30 January 2023
25 May 2018
The 3MI design and heritage comes from the POLDER/PARASOL missions. Algorithms exist in the community for retrieval of cloud optical properties from POLDER/PARASOL which could, in principle, be applied to 3MI data. However, 3MI has additional spectral channels (specifically in the ultraviolet and the short-wave infrared) and more polarised channels than its predecessors and has stringent requirements on its final product quality. In addition, 3MI presents a particular challenge due to the need to provide near real-time data products (~120 minutes after sensing) combined with an increase in spatial resolution which increases the data rate and, therefore, computational cost of product generation.
As 3MI will fly on EPS-SG alongside METimage, which can be expected to produce superior cloud products due to the higher spatial resolution and additional measurements in the infrared spectral region, it is important that any cloud algorithm development should focus on the unique characteristics of 3MI, namely the multi-angular viewing and the measurement of polarisation.
Therefore, support is required for the definition of algorithms for 3MI cloud products which will capitalise on these unique characteristics of 3MI, and be sufficiently fast to be able to be run in near real-time, and sufficiently accurate to satisfy the product quality requirements.
Objectives
The aim of this study was to provide support to the development of cloud property retrieval algorithms from the 3MI instrument on EUMETSAT Polar System – Second Generation (EPS-SG), in particular those which take advantage of the unique characteristics of 3MI as compared to METimage, namely the multi-angular viewing and the measurement of polarisation.
Overview
This support comprised:
- Review and comparison of the currently proposed METimage and baseline 3MI cloud products.
- Proposal for unique and complementary cloud products from 3MI, taking advantage of the multi-view and polarisation information to be documented in an Algorithm Theoretical Baseline Document (ATBD).
- Preparation of a prototype software implementation of the algorithm.
- Demonstration of the performance of the proposed algorithms using test data to be proposed and prepared by the Contractor.
The contractor was required to base its cloud properties retrieval on multi-spectral, multi-polarisation, multi-angle acquisitions, up to 14 acquisitions or 'views (see Figure 1). These are co-registered to a regular, equal area, fixed geophysical grid with configurable grid spacing, close to the instrument footprint spatial resolution (Level 1c data), which are parallax corrected using a digital elevation model of sufficient resolution, and cover the full instrument swath.
The co-registration is done separately for SWIR and VNIR channels with a maximum of 14 acquisitions for both. Since the along-track dimension of the SWIR detector is half the size of the VNIR its viewing angle range along-track is restricted to half of the VNIR detector and, therefore, the detectors share only seven out of 14 viewing angles which are identical to the VNIR angles.

The definition of a new 3MI cloud product was proposed, and specified. It completely relies on developments done on the framework of cloud retrieval based on PARASOL combined with MODIS acquisitions. This algorithm now fully exploits the full directional, spectral and polarimetric capabilities of the 3MI instrument. The prototype implemented this algorithm, and was tested on very realistic test data for 3MI observations.
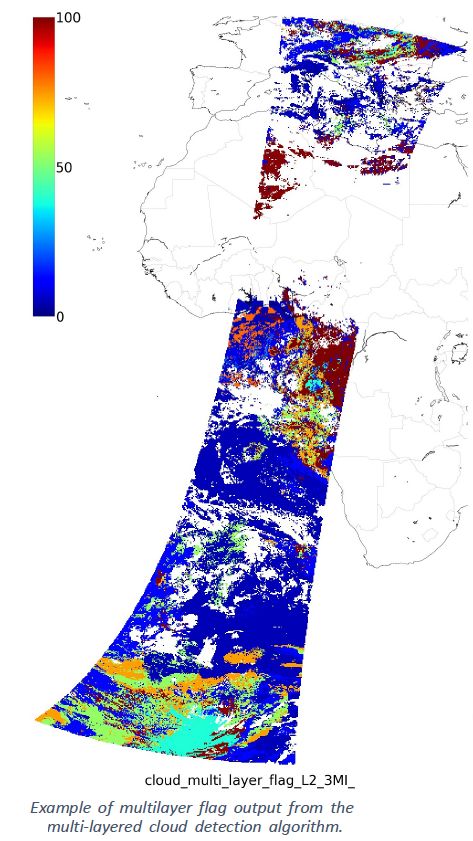
Examples of parameters are illustrated here for one full 3MI orbit. The cloud phase, ice or liquid, is illustrated in Figure 2a. The cloud albedo is illustrated in Figure 2b. The multi-layer flag is illustrated on Figure 2c. Finally, the cloud particle effective radius is illustrated Figure 2d. These parameters were validated against the inputs used to simulate the 3MI orbit, and/or other available data such as the lidar/radar from the A-train.
One outcome of the study was also to identify a list of improvements to be tested before a later implementation on a future update of this processor.