

30 January 2023
02 July 2018
Landmark recognition and matching is a critical step for accurately maintaining Image Navigation and Registration (INR) models and the Geometric Quality Assessment (GQA) of the image products. For MSG/SEVIRI as well as the upcoming MTG/FCI missions, the INR and GQA relay on the observables, such as landmarks.
The basic GQA principle using landmarks is to match them to a reference dataset of superior geometric quality, i.e. reference coastlines. The accuracy of the landmark matching is strongly affected by the ability to detect cloud contamination over a landmark and, therefore, an effective detection algorithm is of significant importance.
Traditional cloud masking identifies the pixels potentially affected by clouds and excludes these for the landmark matching. The reliability of the identification of cloudy pixels depends on the available information. If a cloud detection algorithm is restricted to the image itself, then the detection reliability is limited in particular when only a limited number of spectral channels is available.
Objectives
The objectives of this study are to:
- Quantify the impact of undetected clouds in Image navigation and GQA by comparing two scenarios, one which accounts for a cloud mask, and the other one which omits it.
- Analyse the possibility of omitting cloud information by optimising the quality control of individual matching process without compromising the overall quality of the GQA.
Overview
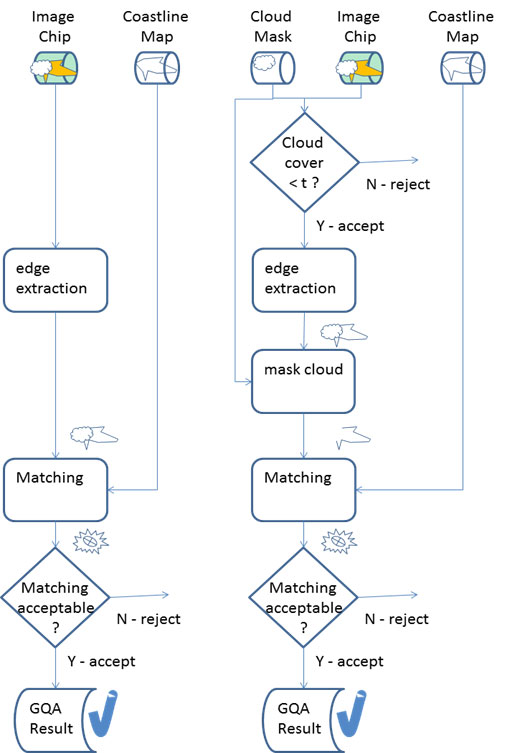
Two approaches are compared in this study. First, an image quality assessment scheme using cloud masks (Figure 1, right column) to protect from the influence of clouds and second, an approach where the usage of the cloud mask is omitted (Figure 1, left column).
In the latter case, the analysis of the matching quality of an individual landmark are a key for overall image quality assessment. Furthermore, it is analysed to what degree, if at all, a cloud mask is superior to a rigorous matching quality analysis.
The study is conducted on a set of landmark chips (i.e. a small part of an image containing a landmark feature) provided by EUMETSAT (Figure 2). The landmark chips were acquired during varying seasonal and time-of-the-day conditions, and correspond approximately to a one year worth of SEVIRI landmark data.
In addition the cloud products, which serve as a reference data associated with the landmark chips, serve as a reference. The Global Self-Consistent, Hierarchical, High-Resolution Geography Database [1] is used to create reference coastline maps.
The analysis showed that not using cloud information increases the chip acceptance reliability used in the GQA estimation process. It enables acceptance, with high reliability, some landmark chips with a high amount of clouds that are rejected by the cloud acceptance criterion of scenario with cloud information.
The principle of scenario without clouds is comparable to the current operational SEVIRI GQA scheme. Thus, this study confirmed the reliability of this approach, and, even in the absence of a reliable cloud mask, the GQA is not compromised.

